Non-destructive testing (NDT) in civil engineering has been widely developed to evaluate the properties of material, component or system of infrastructures for identifying the internal defects without causing any damages. Since NDT does not permanently alter the subject being inspected, it is highly valuable technique because data of damaged area can be obtained without cutting or breaking the material. The Korea Institute of Civil Engineering and Building Technology (KICT, President Kim, Byung-Suk) has announced the development of an autonomous data acquisition framework (sampling) for NDT in infrastructures.
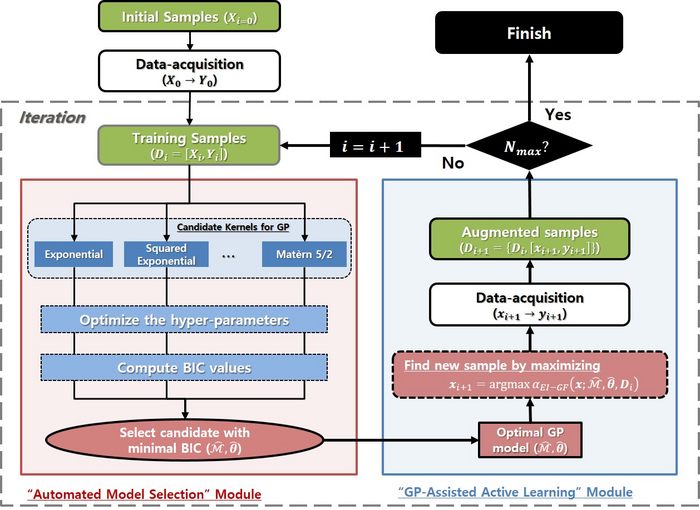
Based on the initial dataset, X, the corresponding feature values, Y, are measured by NDT inspection (via human or autonomous robots). Then, the Bayesian Optimization (BO) loop is performed for GP-assisted active learning to find the most promising location for NDT inspection. Based on the given dataset, D = [X, Y], all candidate kernels (M) are employed to construct the GP. Based on the BIC (Bayesian Information Criterion), the best model (GP(x; M, D)) is automatically selected (i.e., automated model selection). The best model is employed with the acquisition function (αEI-GF) for active learning. By implementing the BO for maximizing αEI-GF, the most promising location is selected and evaluated by NDT inspection to obtain new data (xnew and ynew). Then, dataset D is augmented by adding new data (D ∪ {(xnew, ynew)}). The above mentioned procedure is repeated until the maximum number of samples is reached. Image Credit: Korea Institute of Civil Engineering and Building Technology
Over the past decades, various studies have been investigated to improve efficient and reliable NDT systems. Most of these studies have focused on the development of hardware systems or advanced signal processing. Although the locations being inspected (sampling), are the key aspect for successful damage localization, the formulation of an efficient sampling method has not been widely investigated.
As a conventional design of sampling in NDT techniques, a grid-based sampling is still employed based on human judgement. The grid-based sampling inspects locations at regular intervals from the entire domain of the structure. In this sampling, their locations should be subjectively determined before performing NDT. Because the locations of damages are not always obvious, this grid-based sampling may miss the unknown damages according to subjective design of the grid(Fig 2).
To minimize any subjective judgment and avoid missing out the unknown damages, a research team in KICT, led by Dr. Seung-Seop Jin, has developed Gaussian process (GP)-assisted active learning for autonomous data acquisition framework in NDT. Through numerical and experimental studies, Dr. Jin’s framework outperforms existing frameworks (i.e., grid sampling and non-automated model selection).
The rationale behind this framework is active learning to guide the sampling towards the damaged locations, which are the regions of interest in a sequential manner. The framework initiates the active learning with small samples. The initial samples are evaluated by NDT inspection, then a set of input-output pair (location-damage index) is obtained as the initial training data. Based on the initial training data, Gaussian Process (GP) regression is constructed as a learning algorithm for active learning. Active learning is sequentially implemented to guide the sampling towards the damaged regions.
Then, it adds a new sample to the training data to improve the damage localization. In this regard, newly developed framework can select promising locations for damage sequentially, and this autonomous framework can be applied to data acquisition for any NDT techniques.
The newly developed framework can select optimal model for visualizing damages adaptively at given training samples. Based on the optimal model, the best promising location for sampling can be inferred. This procedure is sequentially iterated until available resources such as maximal number of sample.
From visualizing damage, modeling the GP regression should be carefully performed by choosing kernel. Under even identical training samples, the prediction of GP regression can vary according to kernel. Stated differently, proper choice of kernel can predict and visualize the damage properly at given training samples. In this context, the choice of the proper kernel is the key component for the newly developed framework. This module for automated model selection can accelerate the synergy of the active learning for better damage localization with fewer samples.
The synergy created by Dr. Jin’s framework was evaluated using impact echo tests for concrete structure to identify various internal damages including deep and shallow delamination. IE tests obtains thickness information on internal damage in slab and pavement. The results reveal that the proposed framework is a potential for generating more informative samples by guiding the sampling towards damaged regions. It is empirically shown that the automated model selection can generate synergy in this framework for autonomous data acquisition in NDTs.
As a result, Dr. Jin’s framework provides much better performance for damage identification with fewer training samples. The grid sampling fails to identify some damages, while the proposed framework locates informative samples in all damage regions successfully to identify all damage with better damage resolution.
Dr. Jin said “Utilizing properly active learning will give us a very powerful tool which can be used to aid decision making for the NDT sampling. Active learning can be thought of as 'design methodology’. In our application, it designs sampling plan sequentially and adaptively without any human intervention. For fully automated NDT implementation, the proposed framework can be the core algorithm with unmanned vehicles or robotics by embedding the computational device.”
Reference: Jin, S.-S., Hong, J. and Choi, H. (2022) ‘Gaussian process-assisted active learning for autonomous data acquisition of Impact Echo’, Automation in Construction, 139, p. 104269. doi:10.1016/j.autcon.2022.104269.